Механизм сигнализации положения МСП-1М

- в наличии
Документация
Получение товара
Механизмы сигнализации положения МСП-1М предназначены для преобразования числа оборотов вала в пропорциональный унифицированный электрический сигнал постоянного тока по ГОСТ 26.011, сигнализации промежуточных и блокирования крайних положений выходного вала исполнительного механизма (регулирующего устройства), а также местного указания текущего положения выходного вала исполнительного механизма.
Для реализации всех указанных функций в механизме установлен цифровой датчик БДЦ-2.
Механизмы являются комплектующим изделием Государственной системы промышленных приборов и средств автоматизации (ГСП) в системах автоматического регулирования технологическими процессами (АСУ ТП) в соответствии с командными сигналами автоматических и управляющих устройств.
Механизмы устанавливаются в технологическом оборудовании и регулирующей арматуре со встроенным электрическим приводом, имеющем многооборотный характер исполняемой функции.
Механизмы МСП-1М заменяют весь ряд выпускаемых механизмов МСП-1, имеющих в своём составе механический редуктор, который определяет диапазон входного сигнала. В механизме МСП-1М механический редуктор отсутствует.
Механизмы выполняются в климатическом исполнении У2, Т2 и имеют степень защиты IP54 категории оболочки 2 по ГОСТ 14254.
| Условия эксплуатации | Исполнение | |
|---|---|---|
| У2 | Т2 | |
| Температура окружающего воздуха, °С | -40...+50 | -10...+50 |
| Относительная влажность воздуха, % | 30...95 | 30...98 |
| при температуре, °С | до 35 | до 35 |
| Частота вибрации, Гц | 5...120 | 5...120 |
| амплитуда вибросмещения, мм (до f перехода) | до 0,15 | до 0,15 |
| Магнитные поля постоянные или переменные частотой 50 Гц напряженностью, А/m | до 400 | до 400 |
- диапазон входного сигнала - 1до 1000 об (устанавливается программно);
- скорость вращения входного вала - до 160об/мин;
- диапазон выходного сигнала - 4...20мА постоянного тока;
- погрешность преобразования входного сигнала не более ±1,5%;
- гистерезис выходного сигнала не более 1%;
- цифровая местная индикация положения выходного органа исполнительного механизма (регулирующего устройства) в процентах от диапазона входного сигнала;
- самоконтроль работоспособности электрической схемы и выдача сигнала «Неисправность»;
- индикация направления вращения выходного вала исполнительного (регулирующего) механизма (больше/меньше);
- формирование дискретных сигналов при достижении виртуальных (запрограммированных) промежуточных или конечных «открыто/закрыто» положений (уставки) выходного вала исполнительного механизма (устройства) - контакты реле до 1А при =48В или 0,2А при ~220В (не более 60Вт);
- электрическое питание 24В постоянного тока или 220В переменного тока (исполнение);
- потребляемая мощность не более 5Вт;
- масса 2,8кг;
- габаритные размеры (128х178х228) мм.
Датчик БДЦ-2 имеет четырёхразрядный цифровой дисплей.
Диапазон входного сигнала настраивается программно. Начало отсчёта входного сигнала фиксируется кнопкой. Промежуточные и конечные положения выходного вала исполнительного механизма (регулирующего устройства) устанавливаются в виде дискретных уставок, которые отслеживают текущий выходной токовый сигнал. Уставки записываются программно в энергонезависимой памяти.
Функцию промежуточных сигналов можно использовать в качестве моментных выключателей (переключается программно).
Настройка всех параметров осуществляется четырёхкнопочной клавиатурой на датчике БДЦ-2. Это значительно упрощает настройку и точность установки положения выходного вала исполнительного механизма простым нажатием кнопки.
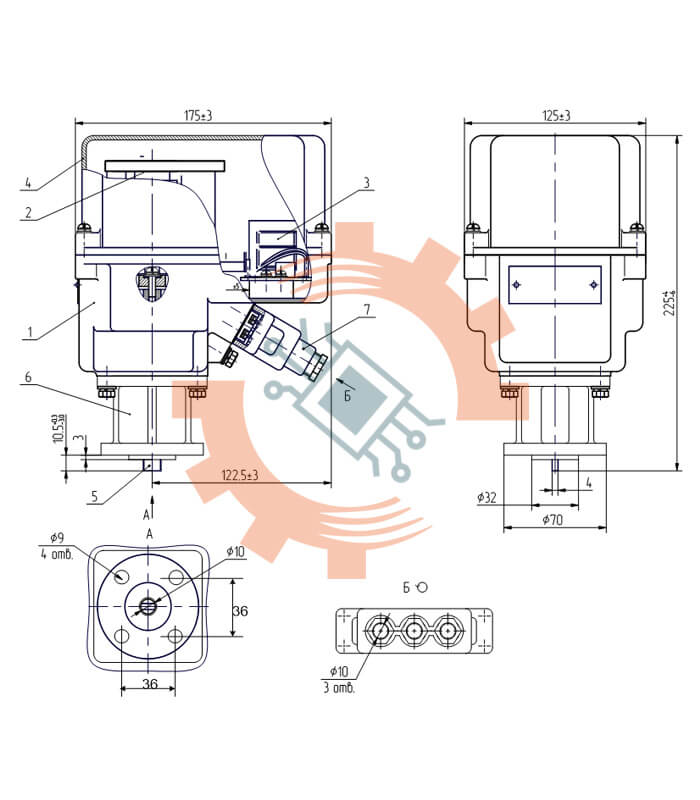
Механизм имеет металлический литой алюминиевый корпус. В корпусе имеется смотровое окно для считывания информации на цифровом дисплее датчика БДЦ-2. Под съёмной крышкой на механизме на лицевой панели датчика БДЦ-2 расположены кнопки настройки параметров и цифровой дисплей.
Сочленение входного вала механизма сигнализации положения с выходным валом исполнительного механизма производится с помощью шлица на торце входного вала (короткий вал) или через дополнительный фланец (длинный вал).
По присоединительным размерам механизм МСП-1М полностью идентичен выпускаемым механизмам МСП-1 и МСП-94.
Механизм изготавливается в восьми исполнениях.
| Условное обозначение | Полный ход входного вала, обороты | Питание, В | Расположение дисплея | Наличие соединительного фланца |
|---|---|---|---|---|
| МСП-1М-1-1 | От 0 до 1000 | =24 | сверху | + |
| МСП-1М-1-2 | От 0 до 1000 | =24 | сбоку | + |
| МСП-1М-1-3 | От 0 до 1000 | =24 | сверху | - |
| МСП-1М-1-4 | От 0 до 1000 | =24 | сбоку | - |
| МСП-1М-2-1 | От 0 до 1000 | ∼220 | сверху | + |
| МСП-1М-2-2 | От 0 до 1000 | ∼220 | сбоку | + |
| МСП-1М-2-3 | От 0 до 1000 | ∼220 | сверху | - |
| МСП-1М-2-4 | От 0 до 1000 | ∼220 | сбоку | - |
Примечание. Значение полного хода входного сигнала настраивается программно в диапазоне от 0 до 1000 оборотов. Минимальный входной сигнал - 1оборот.
Подключение внешних электрических цепей производится через разъём РП10-30.
Крепление механизма сигнализации положения МСП-1М к исполнительному механизму (регулирующему устройству) производится четырьмя болтами М8 на посадочный центрирующий диаметр 32мм.


{kind=link}
{kind=link}